アカウントーセットアップ https://slink.secioss.com/user/
プログラミングを体験しよう
ArduinoIDEのセットアップ

Picocaを使う
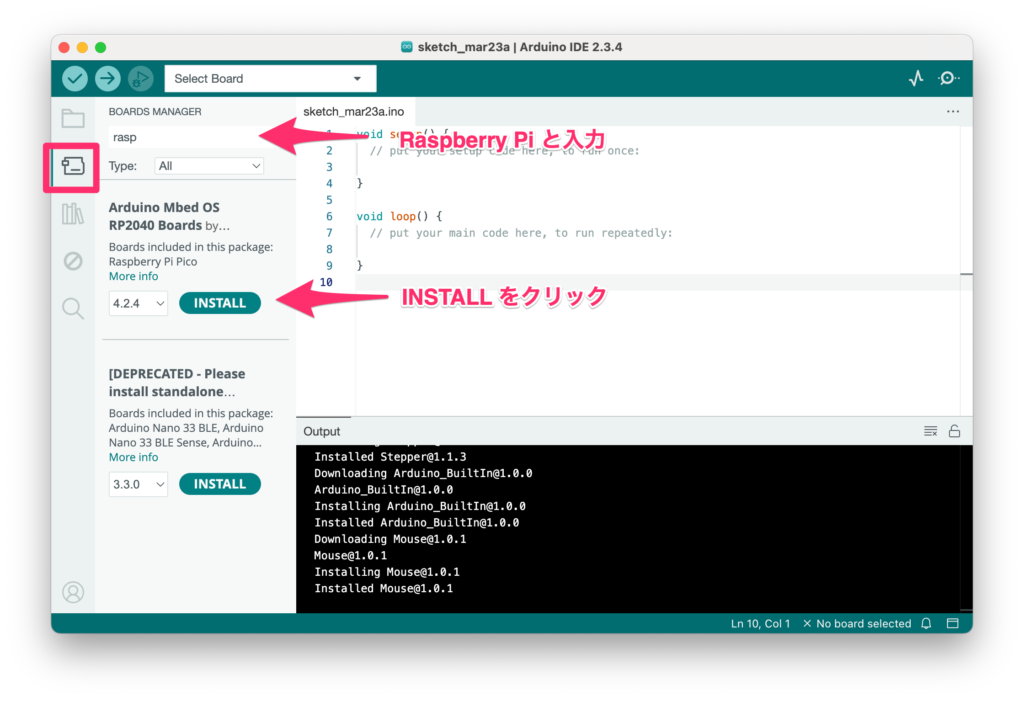
Arduinoとpicocaを接続するためのセットアップを行います。
Arduinoを開き、左側にある、赤い枠で囲んだボードのマークをクリックします。
その後、上部のウィンドウに「Raspbery Pi」と入力し、「INSTALL」でインストールを行います。
Prompt
```
// LED
#define LeftLED 11
#define RightLED 10
#define BoardLED 25
// 距離センサ
#define echoPin 15 // Echo Pin
#define trigPin 14 // Trigger Pin
// 音速の設定
int V = 340;
// モーター
#define PWM_A 0
#define A1 1
#define A2 2
#define PWM_B 6
#define B1 7
#define B2 8
#define Left 0
#define Right 1
// 距離センサに計測用信号を送るように命令
void sendTrigger() {
digitalWrite(trigPin, HIGH);
delayMicroseconds(11);
digitalWrite(trigPin, LOW);
}
// 距離センサから距離を読み取る(単位:cm)
int getDepth() {
sendTrigger();
unsigned long timeout = micros();
while (!digitalRead(echoPin)) {
unsigned long timeout2 = micros() - timeout;
if (timeout2 > 200000) {
Serial.println("Depth Sensor Timeout");
sendTrigger();
timeout = micros();
}
}
unsigned long t1 = micros();
while (digitalRead(echoPin)) {
}
unsigned long t2 = micros();
unsigned long t = t2 - t1;
return V * t / 20000;
}
void drive_A(int v) {
if (v > 0) {
v = min(v, 255);
digitalWrite(A1, HIGH);
digitalWrite(A2, LOW);
} else {
v = max(v, -255);
digitalWrite(A1, LOW);
digitalWrite(A2, HIGH);
}
analogWrite(PWM_A, abs(v));
}
void drive_B(int v) {
if (v > 0) {
v = min(v, 255);
digitalWrite(B1, HIGH);
digitalWrite(B2, LOW);
} else {
v = max(v, -255);
digitalWrite(B1, LOW);
digitalWrite(B2, HIGH);
}
analogWrite(PWM_B, abs(v));
}
void setup() {
// Raspberry Pi Pico内蔵LEDピンを出力に設定して点灯
pinMode(BoardLED, OUTPUT);
digitalWrite(BoardLED, HIGH);
// LEDに接続されているピンを出力に設定
pinMode(LeftLED, OUTPUT);
pinMode(RightLED, OUTPUT);
digitalWrite(LeftLED, HIGH);
digitalWrite(RightLED, HIGH);
//モーターのピンを出力に変更
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(PWM_A, OUTPUT);
pinMode(B1, OUTPUT);
pinMode(B2, OUTPUT);
pinMode(PWM_B, OUTPUT);
Serial.begin(9600); // PCとシリアル接続を開始
// パソコンから外して使用するときはコメントアウト
// while (!Serial); // PCとシリアル接続されるまで待機
// 距離センサ用にピンの入出力を設定
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
// PCに"Start Pico!"を書き込む
// Serial.println("Start Pico!");
}
void loop() {
int depth = 0;
while (true) {
depth = getDepth();
Serial.print(depth);
Serial.println("cm");
// depthの値に合わせてモーターの動きを変更
if (depth < 20) {
digitalWrite(LeftLED, HIGH);
digitalWrite(RightLED, HIGH);
drive_A(150);
drive_B(150);
} else {
digitalWrite(LeftLED, LOW);
digitalWrite(RightLED, LOW);
drive_A(-150);
drive_B(-150);
}
delay(500);
}
}
```
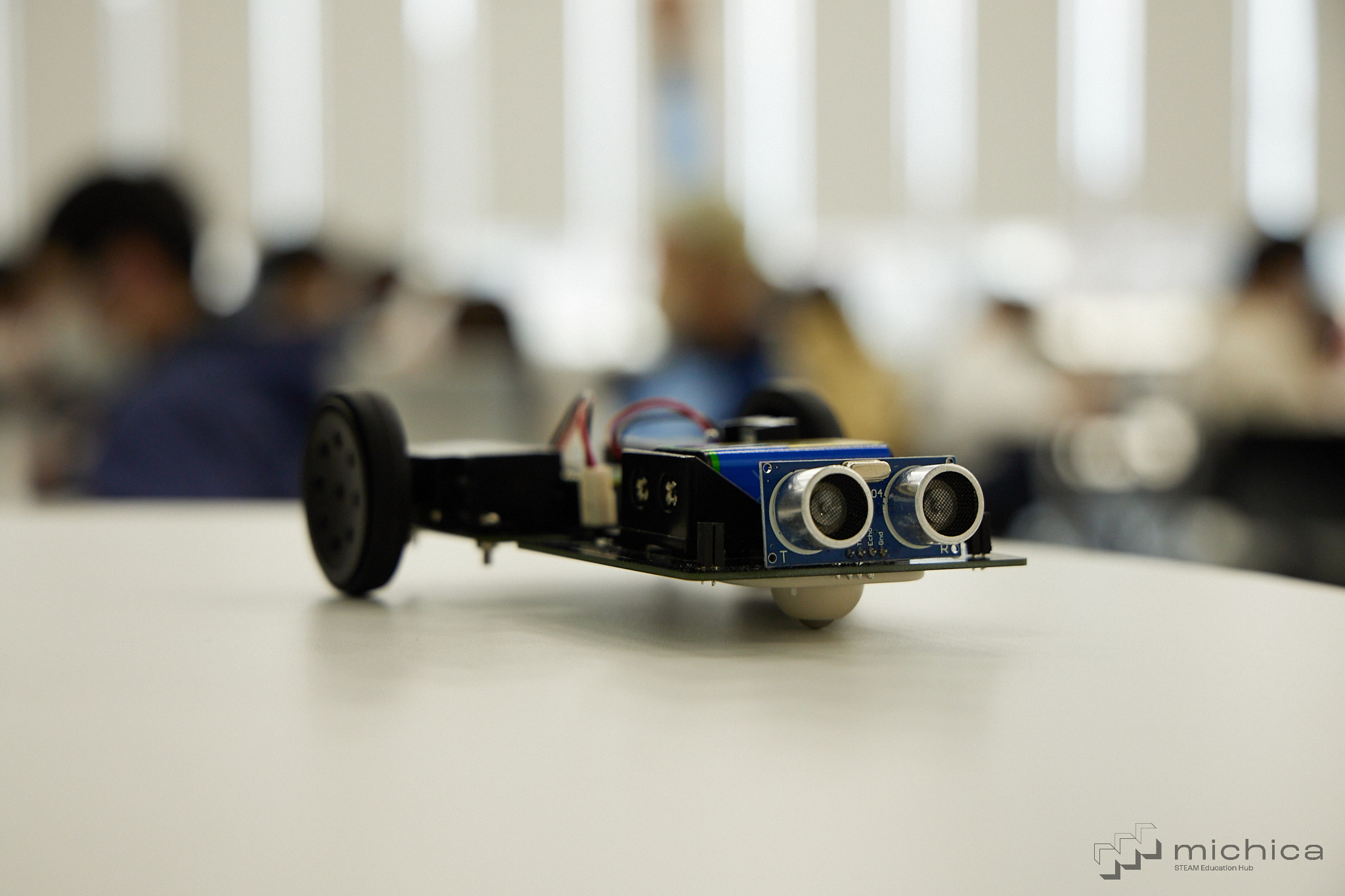
これは、Raspbery Pi Pico を使ったプログラムで、二つのモーター、距離センサを持ったロボットです。
ArduinoIDEを使って開発をしているのですが、内容に沿った、コピペで動くプログラムを作成してください。